Funzioni del sistema
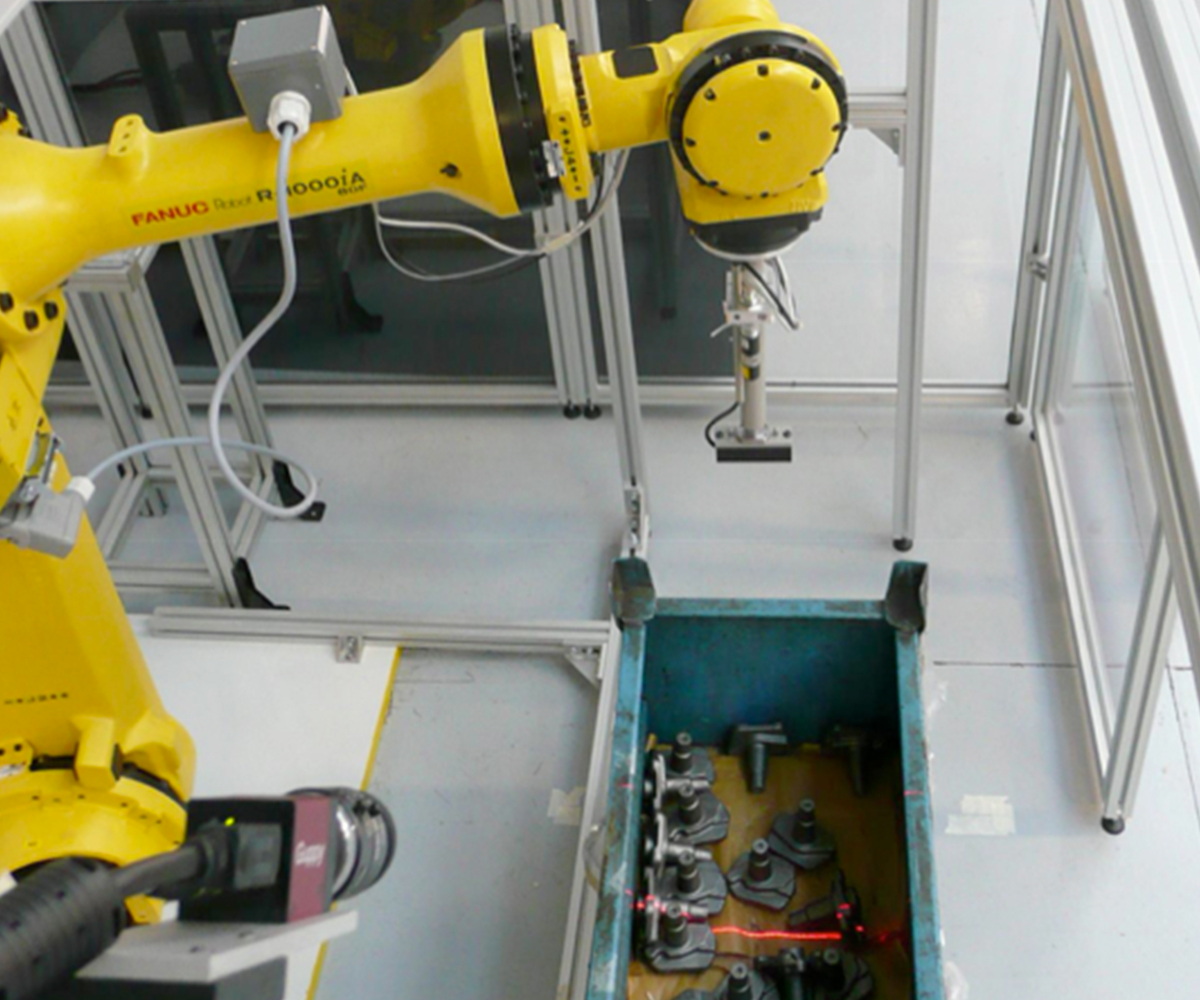
La funzione del sistema è quella di guidare correttamente il robot destinandolo alla presa di oggetti meccanici disposti in maniera casuale all’interno di un cassone. Questo sistema di visione, che si pone come soluzione ad uno di problemi più complessi e di maggior richiesta nel mondo della visione artificiale industriale, deve individuare gli oggetti facilmente accessibili dall’organo di presa del robot.
L’innovativo algoritmo di ricerca dei pezzi è frutto di anni di ricerca e sviluppo di Specialvideo in ambito 3D. I dati tridimensionali vengono “semplificati” fino ad ottenere un modello su cui possono essere applicate le classiche e consolidate tecniche 2D, come ad esempio il pattern matching, i controlli di qualità e le misure dimensionali. Le immagini del sistema di visione create dalla triangolazione laser vengono poi calibrate, ossia i pixel sono convertiti in millimetri secondo un sistema di riferimento condiviso col robot. In questo modo lo scambio di coordinate è corretto e preciso.
Gli algoritmi di ricerca pezzi includono anche criteri di selezione in base ai quali viene determinato l’ordine di presa e l’esclusione di quegli elementi il cui prelievo porterebbe in collisione il braccio del robot con altri pezzi o con il cassone.
Riconoscimento tridimensionale
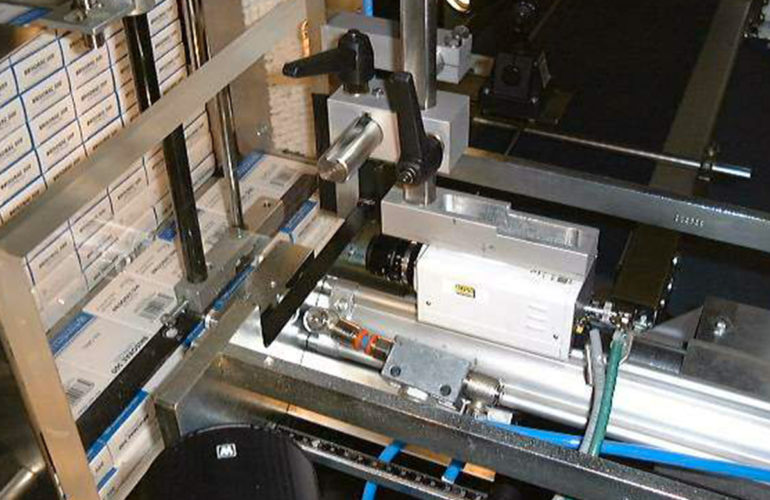
La ricostruzione tridimensionale degli oggetti è realizzata mediante due telecamere e scansione laser. Un laser proietta una linea luminosa sulla scena inquadrata dalle telecamere, in modo tale che le immagini acquisite contengano le linee date dall’intersezione tra il piano del laser e le superfici degli oggetti. Conoscendo l’equazione del piano del laser e la posizione delle telecamere, attraverso un procedimento di triangolazione si ottengono le informazioni necessarie per stabilire le coordinate (x,y,z) dei punti appartenenti alla linea proiettata sulla superficie dell’oggetto. Questo permette una sostanziale indipendenza dai colori e dalla struttura superficiale (texture) dell’oggetto. Le immagini ottenute sono “dense”, cioè contengono informazioni tridimensionali di tutta la superficie e consentono di vedere anche piccoli particolari in rilievo. Questa tecnica permette una risoluzione e precisione adeguate alle applicazioni di guida robot anche per grandi aree di lavoro.
L’utilizzo di due telecamere consente di coprire quelli che sarebbero gli angoli morti determinati dai bordi del cassone e dalla posizione degli oggetti stessi. Vi è inoltre una certa flessibilità nella posizione del cassone stesso rispetto al robot.
Caratteristiche
Download