Funzioni del sistema
L’impiego dei robot nel campo dell’automazione industriale è già da alcuni anni molto diffusa grazie alle doti di versatilità ed affidabilità offerte da questi dispositivi. L’applicazione dei sistemi di visione su linee robotizzate permette di aumentare il grado flessibilità dell’impianto risolvendo i casi in cui la coordinazione “occhio-mano” risulta indispensabile a guidare il robot verso il punto di presa o di deposito.
Specialvideo, società specializzata nella progettazione e realizzazione di sistemi di visione in ambito industriale, realizza sistemi per guida robot che sono personalizzati in base all’applicazione e segue il cliente dallo studio fino alla messa in opera. L’esperienza maturata in molti anni di attività permette di studiare soluzioni affidabili nel tempo che garantiscono prestazioni sull’applicazione reale e non sul singolo dispositivo.
Caratteristiche
Le caratteristiche principali per la buona riuscita di un sistema di visione per guida robot sono:
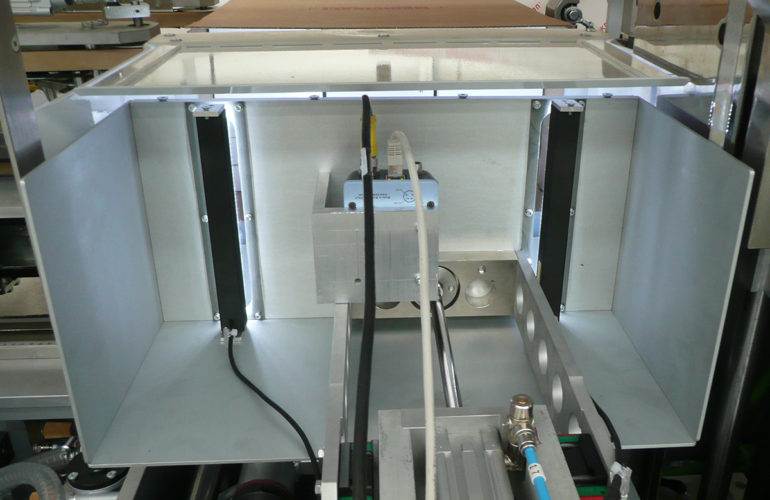
L'apparato d'illuminazione
Lo studio degli apparati d’illuminazione riveste un ruolo molto importante in ogni sistema di visione, in particolare nei sistemi per guida robot deve essere realizzato ottenendo una corretta illuminazione dei pezzi che sia compatibile con l’area di lavoro. Spesso, infatti, il sistema di visione inquadra una porzione dell’area di lavoro del robot che deve restare libera da ingombri rendendo difficile l’installazione di protezioni per la luce ambientale.
In questi casi si possono utilizzare degli illuminatori stroboscopici che rendono possibile il funzionamento del sistema di visione anche in luce ambiente e senza protezioni.
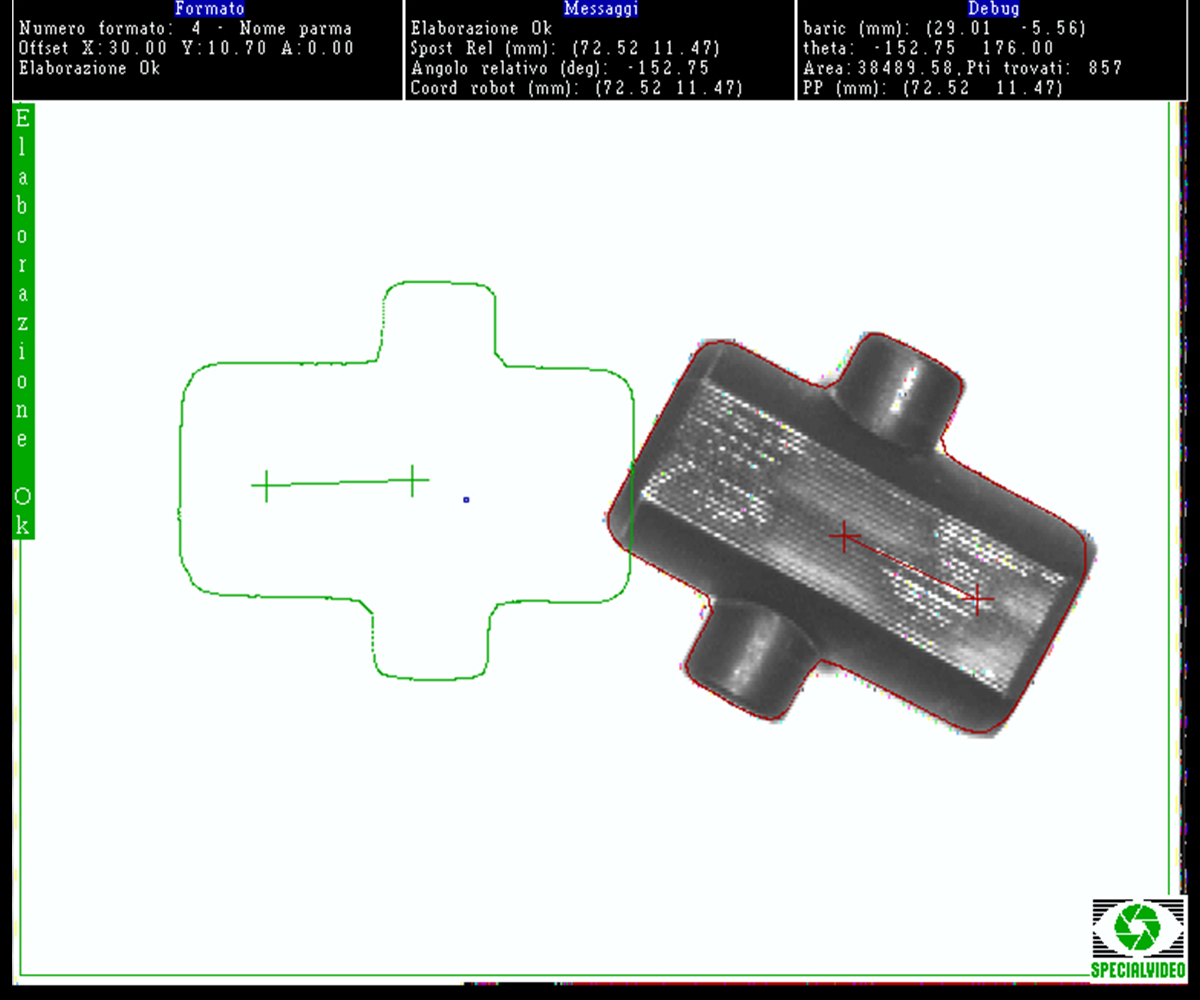
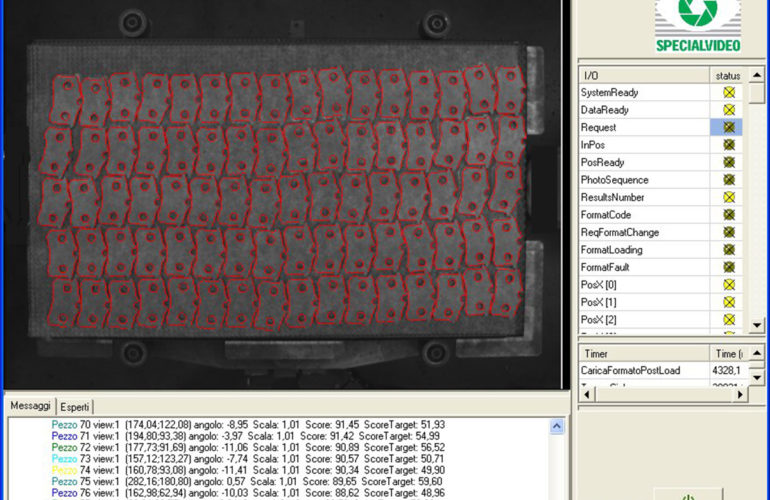
Algoritmi di ricerca
dei pezzi
Vengono utilizzati tecniche di estrazione dei contorni oppure algoritmi che fanno uso della intera immagine del pezzo, con compensazione degli effetti della variazione dell’illuminazione; per alcune personalizzazioni sono state utilizzate misure di precisione, sia lineari che angolari
Algoritmi
di calibrazione
Per garantire elevate precisioni nelle misure nei sistemi per guida robot, Specialvideo ha realizzato una procedura per la calibrazione delle coordinate del sistema di visione rispetto alle coordinate degli assi del robot. Questa procedura permette in modo automatico di:
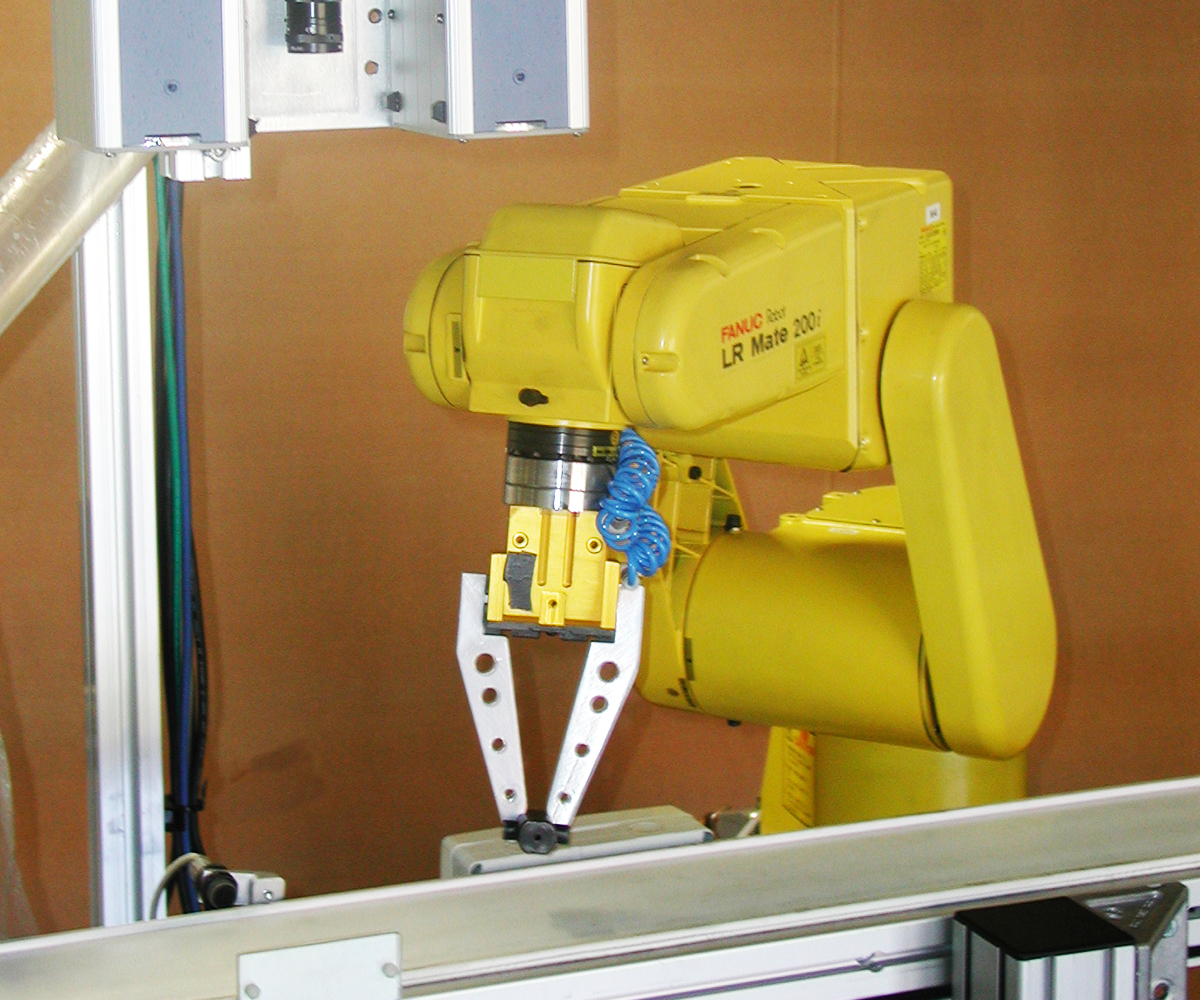
Il sistema di visione può essere collegato a qualsiasi tipo di robot tramite varie interfacce (I/O digitali, RS232, Ethernet, ecc.) e può funzionare sia con pezzi fermi che in movimento sfruttando le capacità di conveyor tracking dei robot.
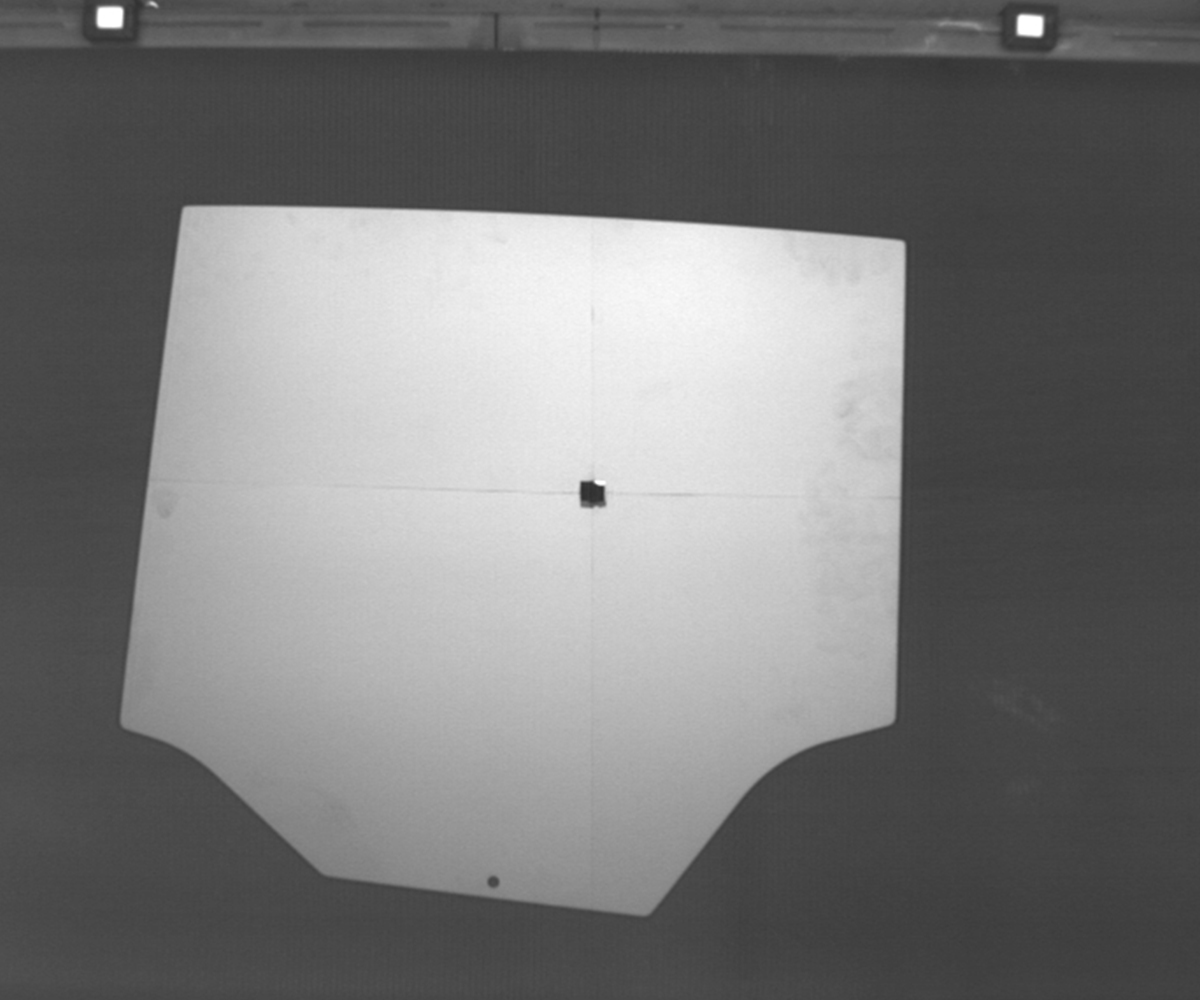
Guida robot
per vetri auto
Tra le applicazioni realizzate possiamo citare quella che riguarda la guida robot per la presa di vetri d’auto. In questo caso lo scopo è di prelevare i vetri da una linea di trasporto e depositarli in pallet di raccolta. I vetri vengono arrestati in posizione pressoché casuale all’interno del campo inquadrato, il sistema di visione rileva le coordinate del vetro e le trasmette al robot che effettua il “pick and place”.
Il campo inquadrato dalla telecamera è di circa 1200×900 e, grazie a speciali algoritmi di calibrazione e correzione prospettica, è stato possibile raggiungere precisioni sul deposito (inclusa l’incertezza dovuta alla ventosa) dell’ordine di qualche decimo di millimetro. In questo caso la deformazione introdotta dall’obiettivo comporta un errore tra il centro ed i lati di circa 5mm che, senza una adeguata compensazione, non avrebbe permesso il deposito dei pezzi entro le tolleranze richieste.
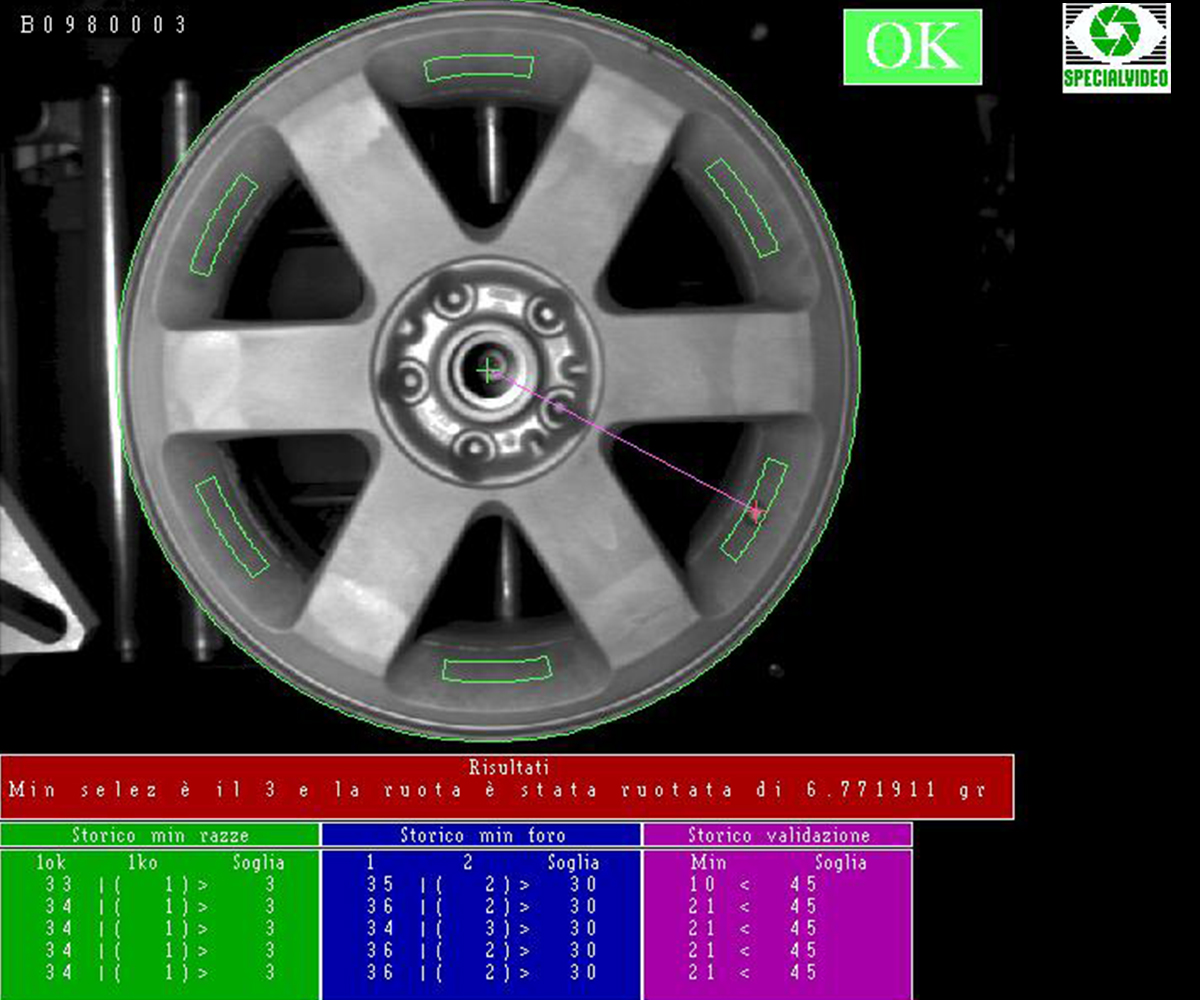
Guida robot
per cerchi in lega
Le ruote in lega leggera sono sottoposte a diverse fasi di lavorazione dopo la fusione. Normalmente l’esecuzione avviene con macchine automatiche asservite da robot. Il sistema di visione identifica le ruote immesse nel ciclo di lavorazione, cerca il punto in cui dovrà essere realizzato il foro valvola e comanda la rotazione fino alla posizione di riferimento. Il sistema può lavorare con diversi tipi di ruote ed il set-up avviene mediante una pratica e semplice procedura di autoapprendimento. La precisione raggiunta è intorno al decimo di grado.