




Panoramica su metodologie e applicazioni tipiche
Le tecniche 3D vengono utilizzate in svariati ambiti, dal controllo della qualità alla guida robot. Per quanto concerne la guida robot è necessario non confondere le necessità di tempo di calcolo del sistema di visione con le necessità del robot (anche quanto il calcolo richiede tempo in genere viene effettuato in anticipo sugli spostamenti del robot).
Un vantaggio generale del 3D è la sostanziale indipendenza dal colore, anche se nei dettagli varia a seconda della tecnica.
La necessità di avere l’oggetto fermo o in movimento può essere sia un vantaggio che uno svantaggio (ad es. è un vantaggio necessitarlo in movimento se si trova già su un nastro trasportatore). Le tecniche che richiedono una singola immagine (snap) prescindono dal movimento o meno dell’oggetto.
In questo campo d’azione le tecniche utilizzate fanno capo a due branche principali:
Ci soffermiamo sulle tecniche di Triangolazione
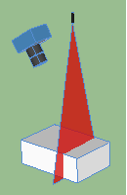
Un laser lineare illumina una sezione dell'oggetto. Conoscendo la posizione della telecamera e del laser, è possibile ricavare le coordinate dei vari punti illuminati dal laser. Per effettuare la scansione dell'oggetto è necessario che il laser o l'oggetto si muova. Si ottiene un'immagine "densa", cioè si hanno buoni dati su tutti i punti della superficie.
Questa tecnica è, anche più delle altre, indipendente dai colori; d'altra parte è impossibile ottenerli anche se fossero necessari. Viene utilizzata per svariate applicazioni, dalla guida robot al controllo della qualità.
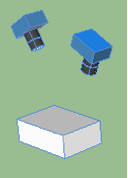
Si utilizzano due telecamere, che riprendendo l'oggetto da angoli diversi, permettono una visione stereoscopica dei punti inquadrati da entrambe (similmente alla visione umana).
È sufficiente una singola immagine (snap) ed è quindi possibile applicare questa tecnica sia su oggetti fermi, che in movimento. L'immagine risulta poco densa, cioè non si avranno tutti i punti dell'oggetto, ma dei punti ottenuti si avranno comunque buoni dati. Volendo, è possibile ottenere anche i colori dell'oggetto.
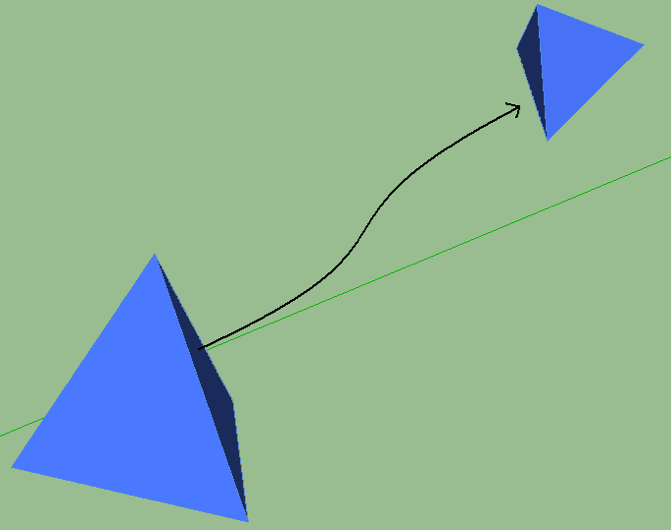
Richiede che la parte che si vuole studiare dell'oggetto sia tutta su una stessa superficie, ovvero un piano nello spazio. Considerando la dimensione e la deformazione prospettica si ottiene la posizione dell'oggetto nello spazio.
Lavora su singola immagine (snap). Generalmente non necessita di un apposito illuminatore, è sufficiente una telecamera.
È una tecnica esaustiva, si considerano tutte le possibili rotazioni dell’oggetto (almeno sugli angoli di potenziale interesse). Servono molti bordi facilmente visibili. Lavora su singola immagine (snap). Generalmente non necessita di un apposito illuminatore.
Si necessita di un oggetto statico e si fanno una decina di immagini da angolazioni differenti. E’ una tecnica lenta ma precisa. Utilizzabile per misure e per reverse engineering, ma non per la guida robot.
Svariate inquadrature di un singolo oggetto fatte da una telecamera. E’ necessario che si vedano bene i bordi, quindi ad esempio è adatto per un cubo ma non per una sfera. E’ necessario il confronto con un modello cad completo dell’oggetto, non essendo sufficiente il confronto con qualche immagine di riferimento.
È un metodo lento, è sufficiente una telecamera e in genere non è richiesto nemmeno un illuminatore apposito. È adatto alle applicazioni di guida robot per cui sia sufficiente una bassa precisione.
| Tecnica di triangolazione | Condizioni | Vantaggi | Svantaggi | Applicazioni tipiche |
|---|---|---|---|---|
| Laser | Movimento | Denso | No colori | Tutto (guida robot, controllo qualità) |
| Stereoscopica | Snap | Anche colori | Poco denso | Guida robot |
| Omografia | Snap | Molto veloce, generalmente no illuminatore | Tutta superficie su unico piano, non preciso | Inseguimento oggetti |
| Pattern matching | Snap | Generalmente no illuminatore | Tecnica esaustiva | Inseguimento oggetti |
| Fringe | Statico | Preciso, una sola telecamera | Lento | Reverse engineering, misure |
| Viste multiple | Snap | Una sola telecamera, no illuminatore | Lento, necessità bordi e modello cad | Guida robot con bassa precisione |