Funzioni del sistema
Questo sistema di visione, realizzato da Specialvideo per il settore automobilistico, è in grado di effettuare diversi controlli in un punto critico della linea di produzione delle ruote.
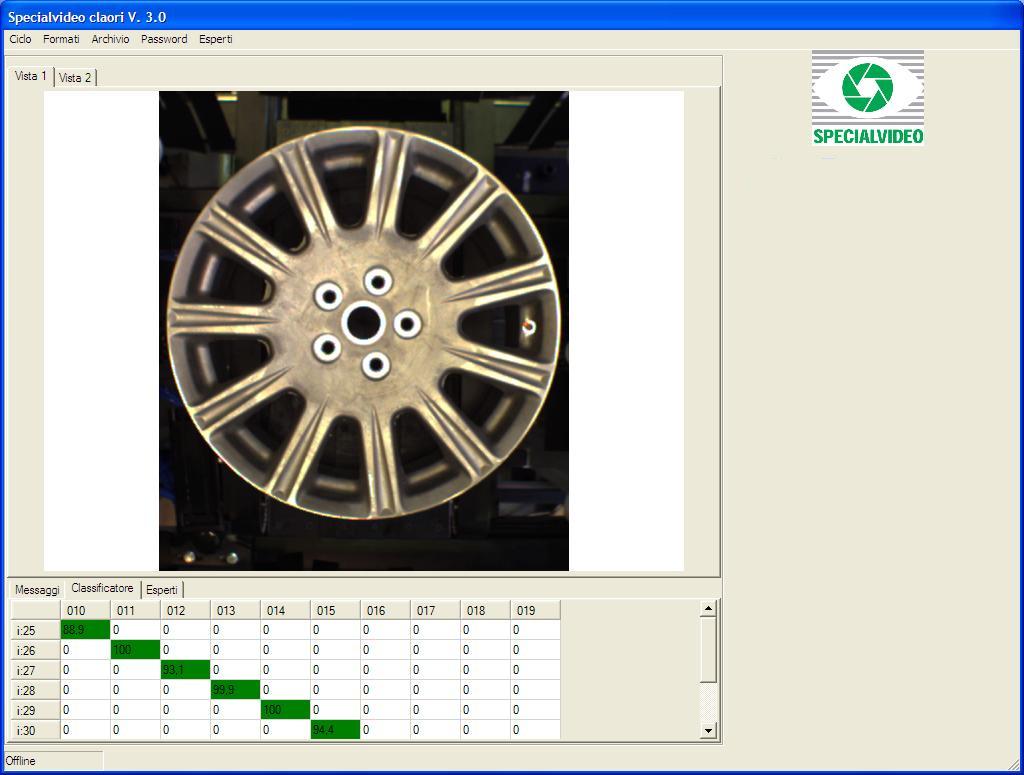
Svariate tipologie di cerchioni vengono prodotte simultaneamente dai macchinari a monte della catena e raggiungono le macchine equilibratrici e la zona della finitura pneumatici. E’ necessario distinguere tra i vari modelli di pneumatici in modo da eseguire correttamente le successive fasi della lavorazione. E’ inoltre fondamentale individuare la posizione del foro valvola e verificare se esso è vuoto o se un oggetto è inserito al posto della valvola per simularne il peso.
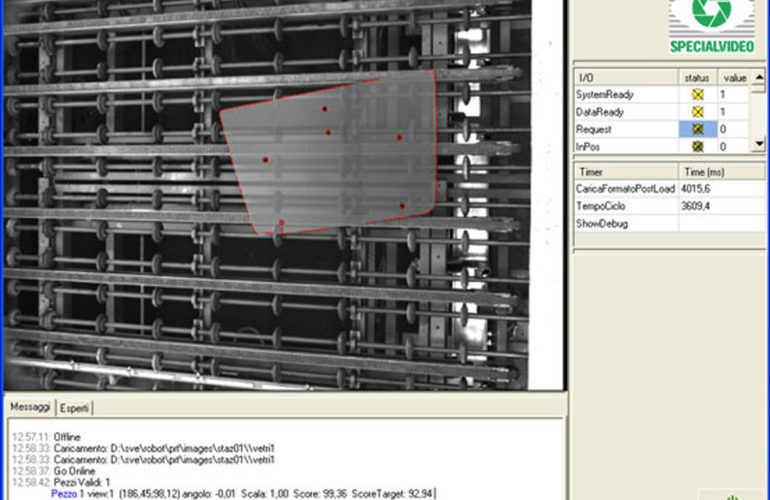
Il sistema di visione determina il tipo di ruota sulla base di altezza, diametro e offset ma, qualora si ricada in un caso dubbio, individua la tipologia specifica grazie ad un pattern matching geometrico. Il software comunica quindi il tipo di cerchione e l’orientamento alle macchine spazzolatrici ed equilibratrici.
Conoscere la posizione e i il tipo di riempimento (se presente) del foro valvola è necessario per poter effettuare correttamente la verifica e l’aggiustamento dell’equilibratura della ruota (simulando la valvola in caso non vi sia un riempimento fisico sostitutivo).
Gli algoritmi sviluppati da Specialvideo per questa applicazione sono ideati per soluzioni generali e non specificatamente per alcune tipologie di cerchioni. Nella fase di memorizzazione è possibile far procedere il programma all’apprendimento di nuove tipologie di cerchioni. Se le ruote pre-memorizzate diverse dovessero essere un numero particolarmente elevato, è anche possibile restringere l’identificazione ai modelli effettivamente prodotti in un dato periodo.
Descrizione dell'impianto
I dati su altezza, diametro e offset del cerchione vengono calcolati dalle altre strumentazioni della linea e forniti al sistema di visione. Il calcolo dell’altezza è basato su una barriera di fotocellule Datalogic. Il pattern matching è invece calcolato su un’immagine catturata dalla telecamera del sistema di visione stesso.
A seconda delle specifiche necessità il sistema è a colori o basato sui livelli di grigio, mentre l’illuminatore può essere a LED oppure costituito da flash.
I risultati possono venire comunicati al PLC dell’impianto oppure direttamente ad un robot. In generale questo sistema di visione può essere utilizzato sia per la verifica del prodotto finale che per gestire le fasi successive della lavorazione, come ad esempio il controllo dell’equilibratura o l’eliminazione di difetti tramite macchine spazzolatrici.
L’appartenenza di una ruota ad un dato modello è basata su uno score di somiglianza, visibile nell’interfaccia e i cui parametri sono modificabili da un operatore esperto.