La tecnica della triangolazione laser
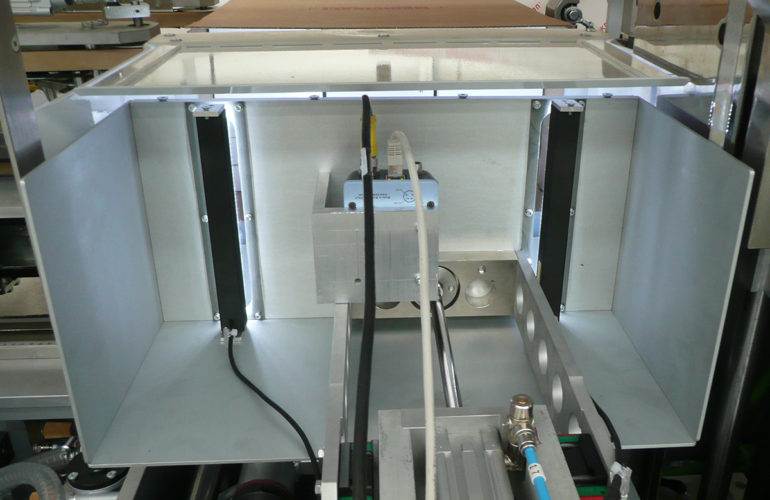
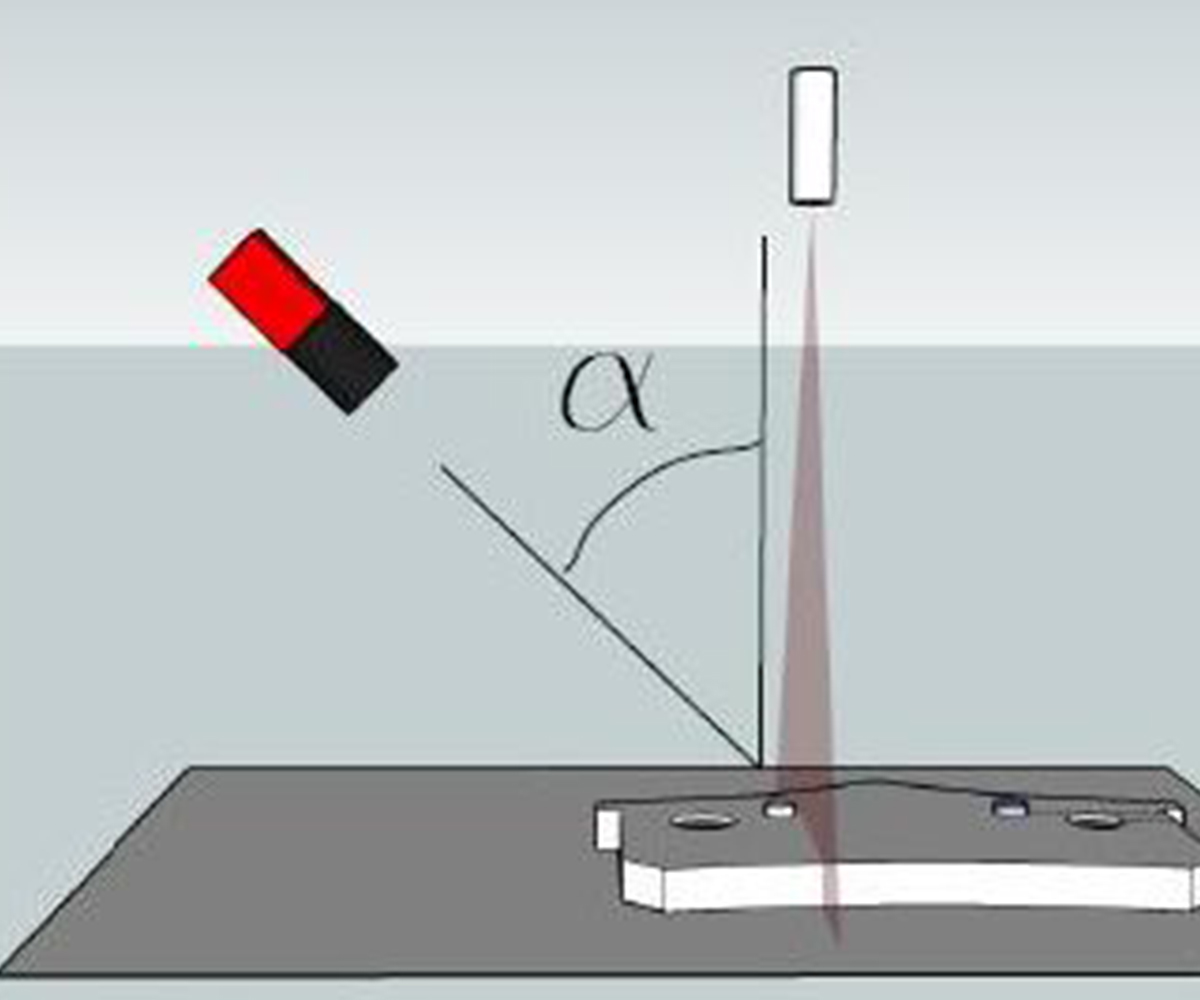
Specialvideo ha realizzato un sistema di guida robot per la presa pezzi piani e lamiere piegate disposti alla rinfusa in una cassetta (bin picking). La ricostruzione tridimensionale degli oggetti è realizzata mediante scansione laser, sfruttando la tecnica della triangolazione con la telecamera. Un laser proietta una linea luminosa sulla scena inquadrata dalla telecamera, in modo tale che le immagini acquisite contengano le linee date dall’intersezione tra il piano del laser e le superfici degli oggetti.
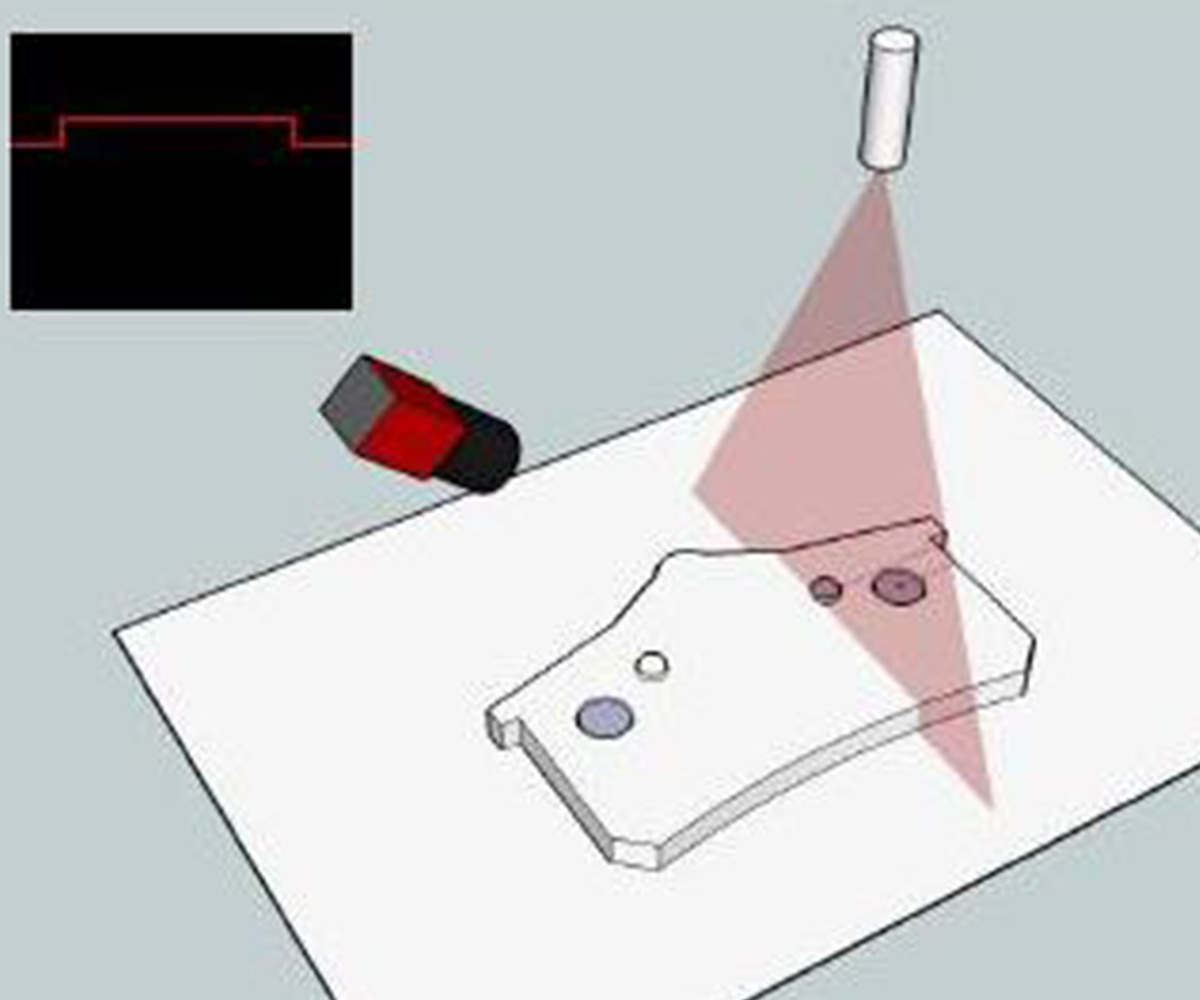
Conoscendo l’equazione del piano del laser e la posizione della telecamera, attraverso un procedimento di triangolazione, si ottengono le informazioni necessarie per stabilire le coordinate (x,y,z) dei punti P appartenenti alla linea proiettata sulla superficie dell’oggetto.
(Figure 1 e 2)
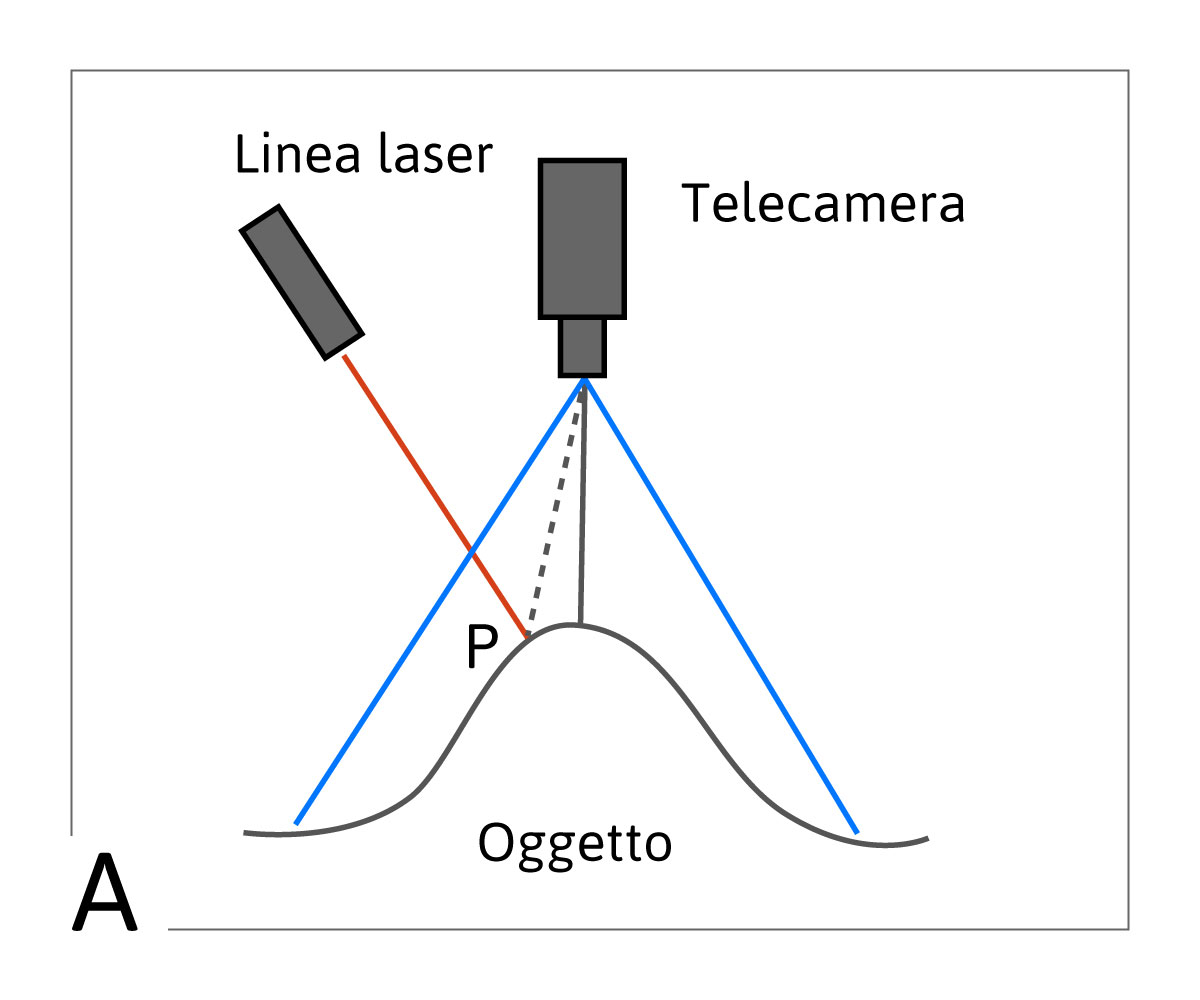
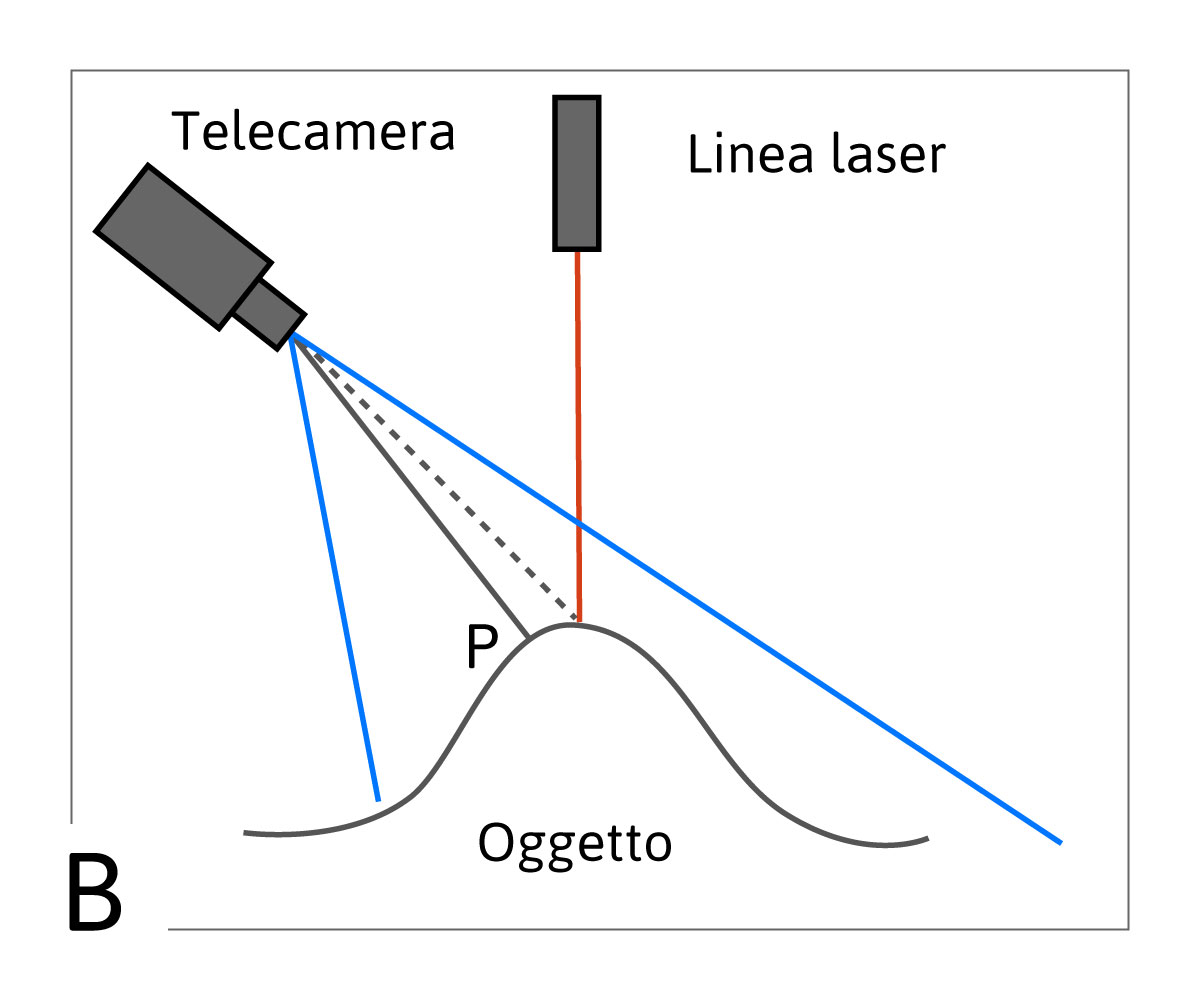
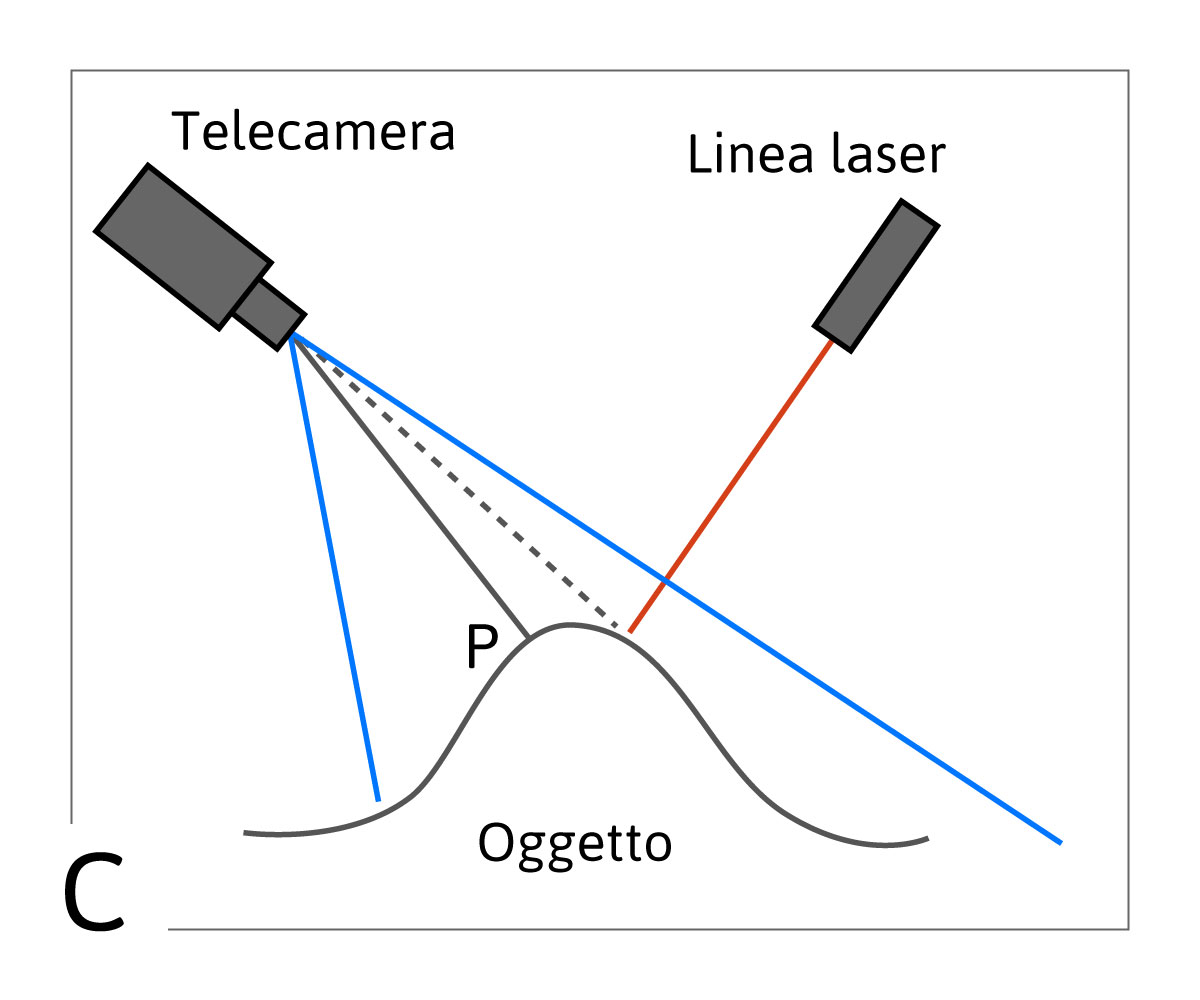
Le configurazioni possibili della coppia laser- telecamera sono diverse ed ognuna è preferibile alle altre secondo gli obiettivi e le caratteristiche superficiali egli oggetti presenti nella scena come ad esempio la riduzione dei sotto-squadri, la presenza di superfici riflettenti ecc.
(Figura 3)

Vantaggi
I principali vantaggi di questa tecnica sono:
Funzioni del sistema
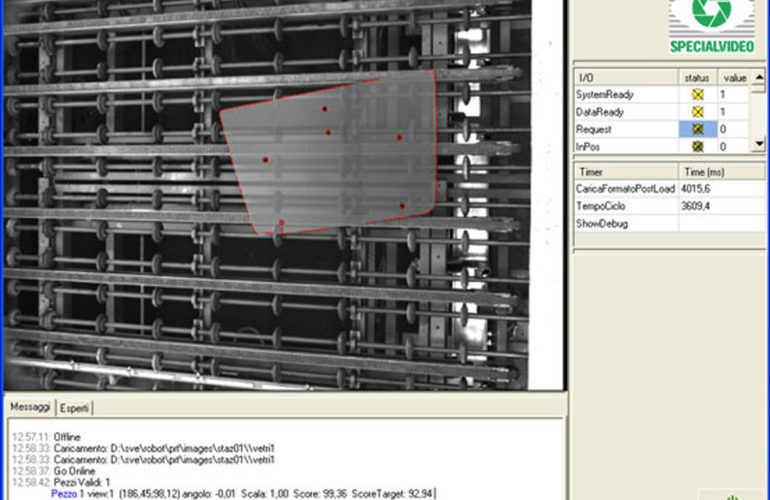
La funzione del sistema è quella di guidare correttamente il robot destinandolo alla presa di oggetti meccanici a superficie piana disposti in maniera casuale all’interno di una cassetta. Il sistema di visione, che si pone come soluzione ad uno di problemi più complessi ed anche di maggior richiesta nel mondo della visione artificiale in ambito industriale, deve individuare gli oggetti facilmente accessibili dall’organo di presa del robot.
L’innovativo algoritmo di ricerca dei pezzi è frutto di anni di ricerca e sviluppo di Specialvideo in ambito 3D.
Le informazioni aggiuntive fornite dalla terza dimensione vengono “semplificate” fino a calcolare il piano di giacitura dei pezzi (Figura 5); successivamente possono essere applicate tutte tecniche 2D consolidate come ad esempio il pattern matching, i controlli di qualità, le misure dimensionali.Le immagini del sistema di visione create dalla triangolazione laser sono calibrate, ossia i pixel sono convertiti in millimetri secondo un sistema di riferimento condiviso col Robot.
In questo modo lo scambio di coordinate è corretto e preciso. Le immagini calibrate sono generate mediante una proprietaria libreria di image processing tridimensionale che vede al suo interno implementate le più recenti tecniche di calibrazione multidimensionale.