The three-dimensional laser scanning
The three-dimensional objects reconstruction is realized through a laser scanning, using the triangulation technique with a camera
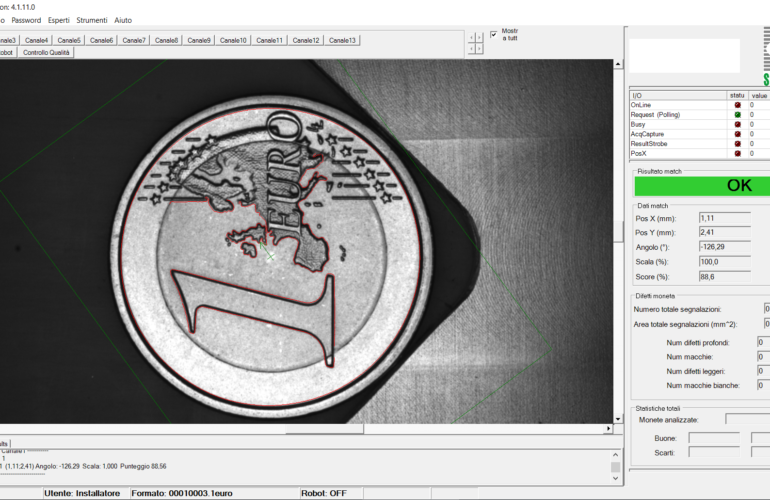
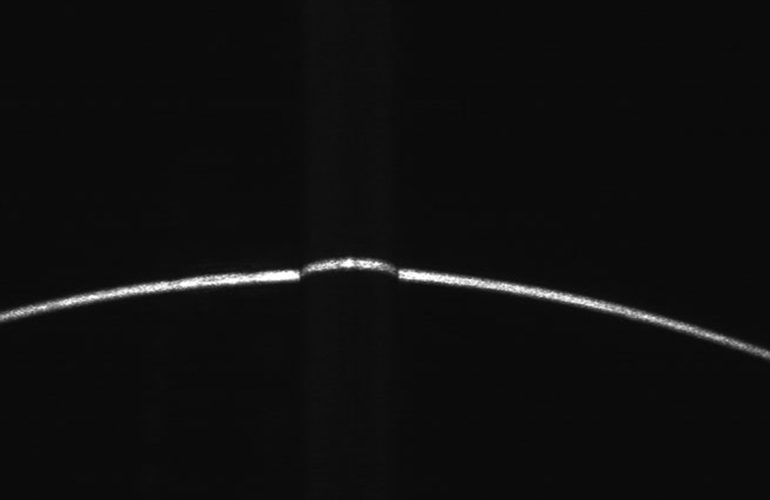
A laser projects a bright line on the framed scene by the camera, so that the captured images contain the lines given by the intersection between the laser plane and the object surfaces.
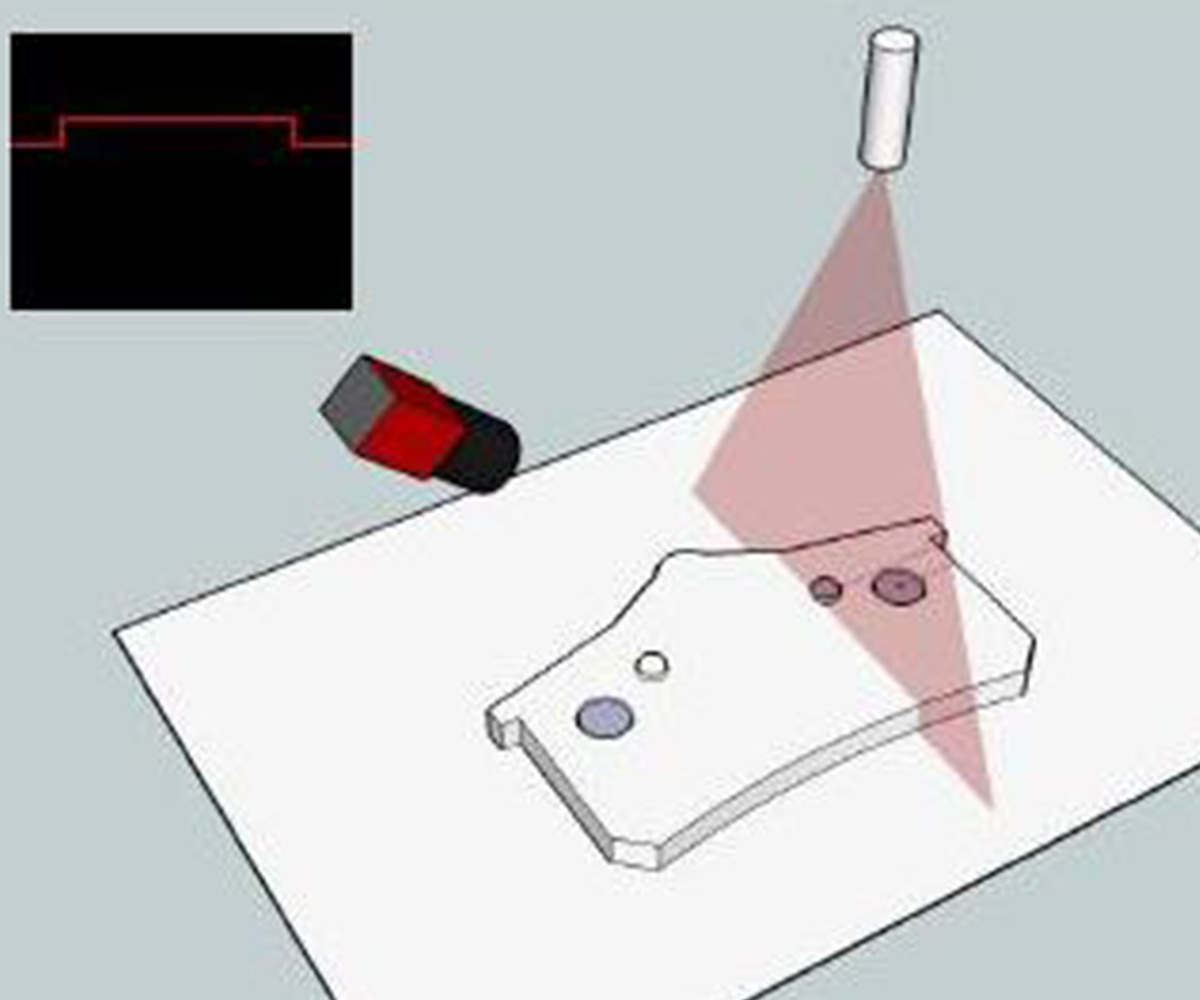
Knowing the laser plane equation and the camera position, through a triangulation process,we obtain the information necessary to determine the coordinates (x, y, z) belonging to the point P projected line on the object surface.
(Figures 1 and 2)
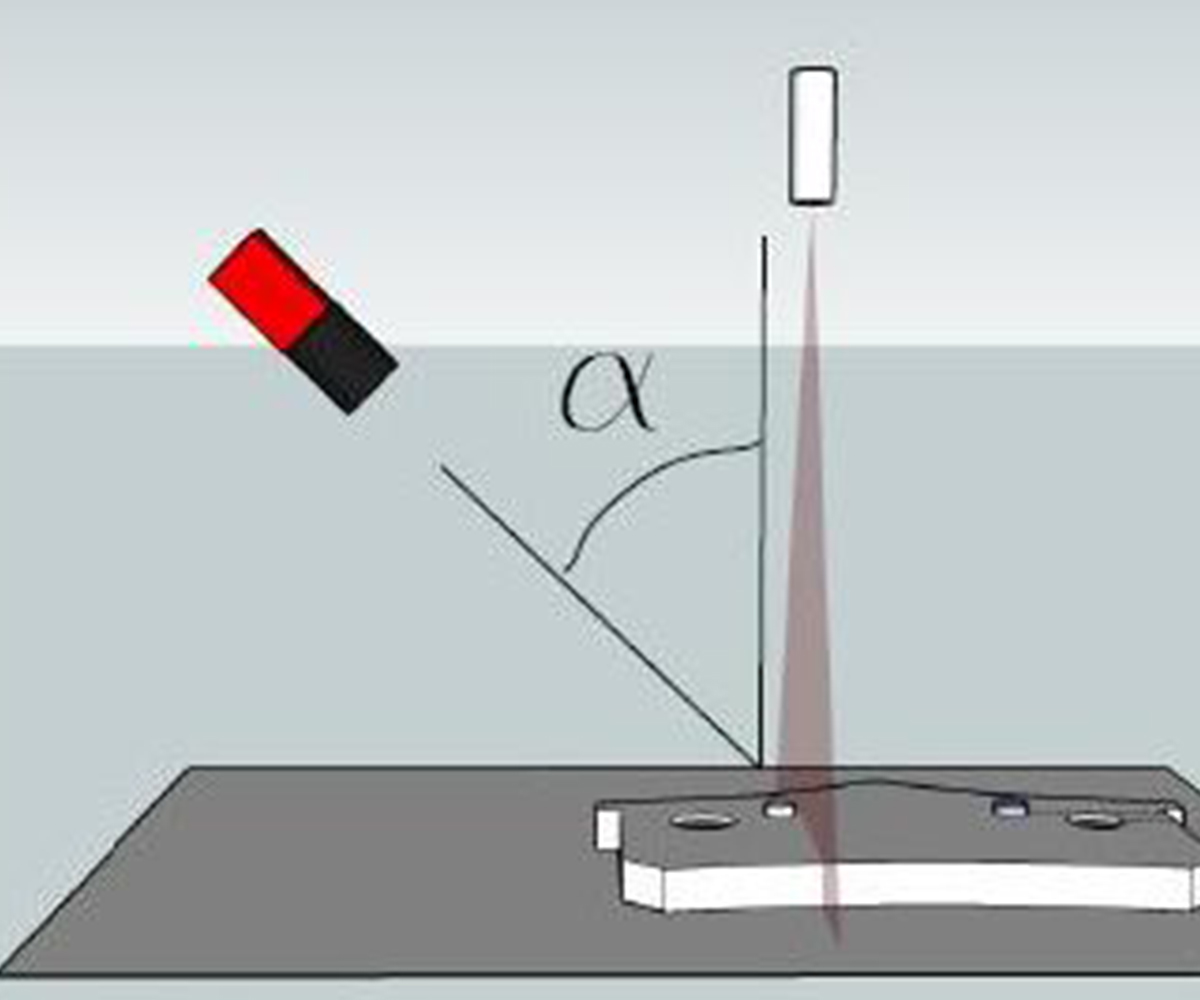
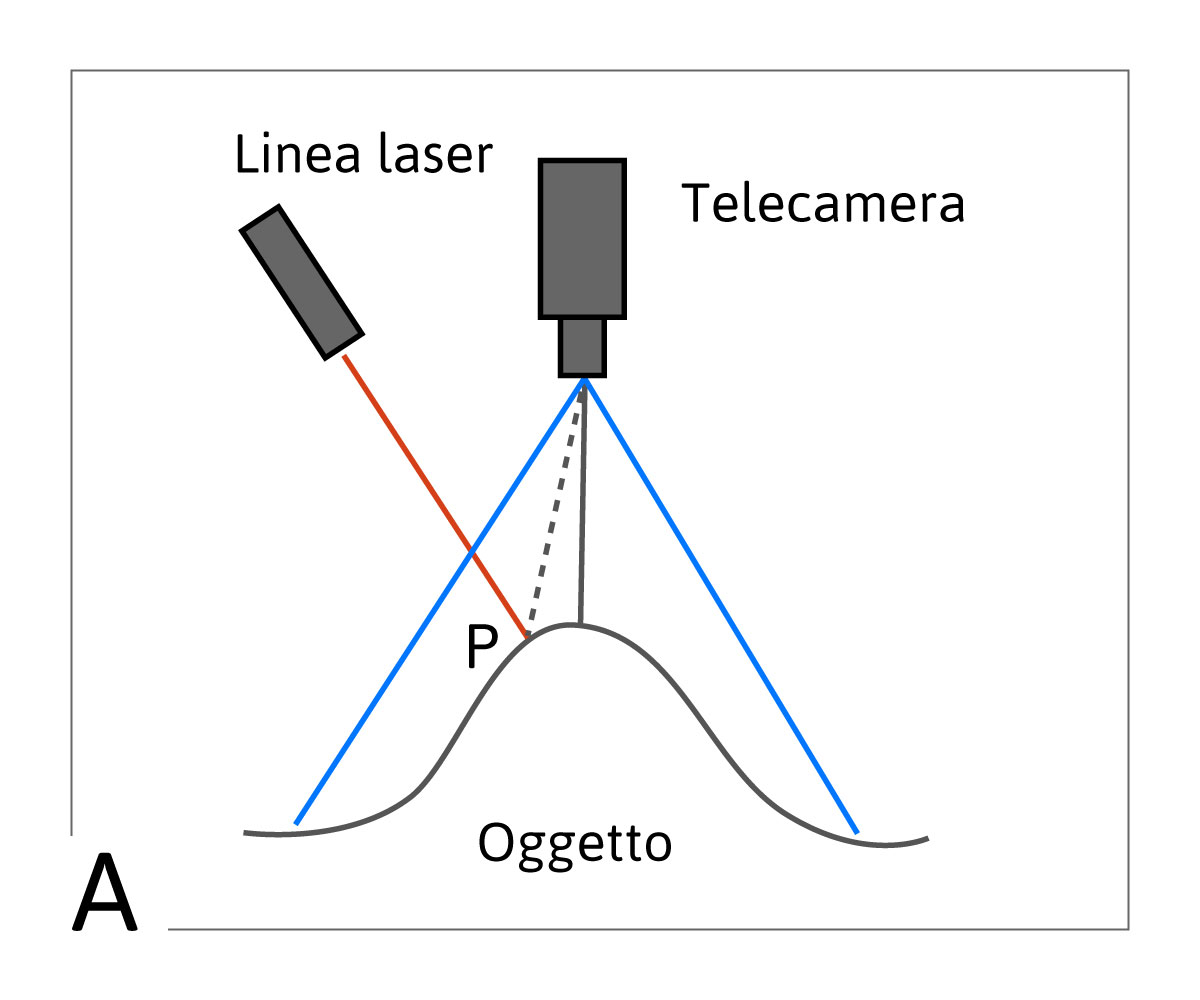
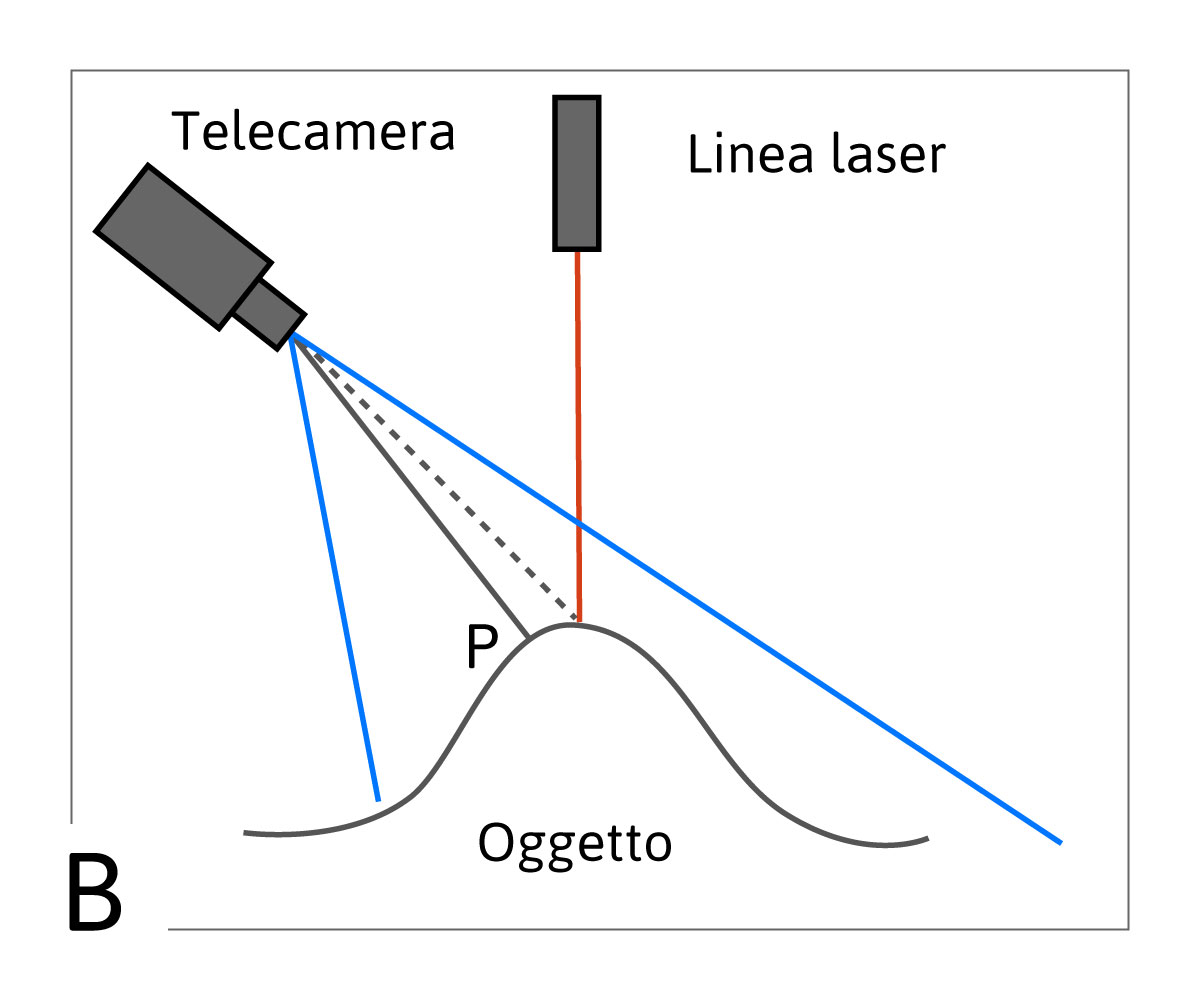
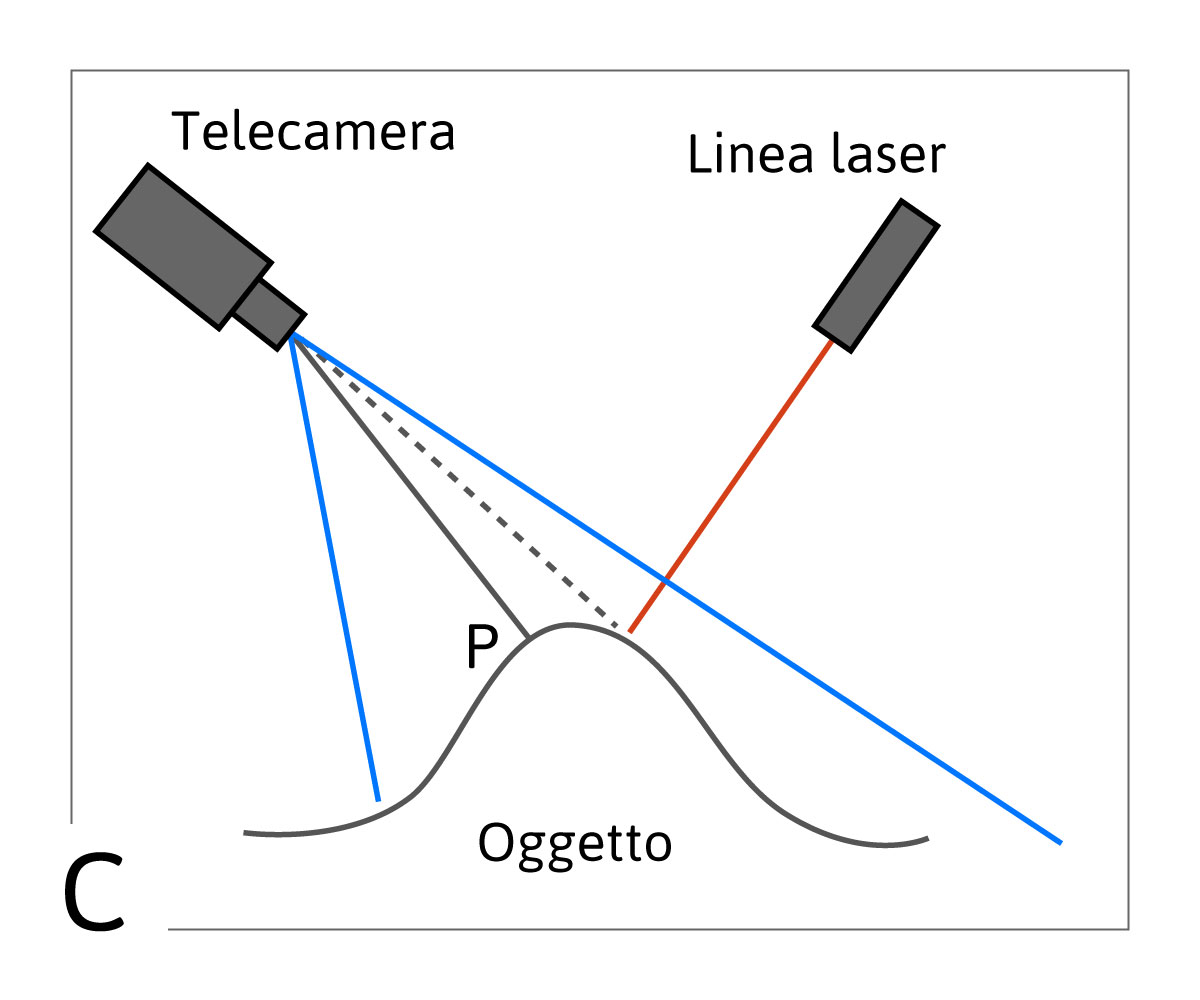
The possible laser-camera couple configurations are three. They can be selected according to the objectives to be achieved and the objects surface characteristics in the scene such as the reduction of sub-squares, the presence of reflective surfaces etc.
(Figure 3)

Benefits
The main advantages of this technique are:
These advantages make the laser scanning one of the preferred methods to obtaining three-dimensional images in the industrial field.
System Features
The system function is to properly guide the robot assigning it the mechanical objects grasp to flat surface arranged randomly within a cassette.
The vision system, which arises as a solution to one of the most complex problems and most in demand in the artificial vision world in industrial field, must locate objects easily accessible by the picking robot.
The innovative pieces research algorithm is the result of years of dedicated research and development by Specialvideo in the 3D.
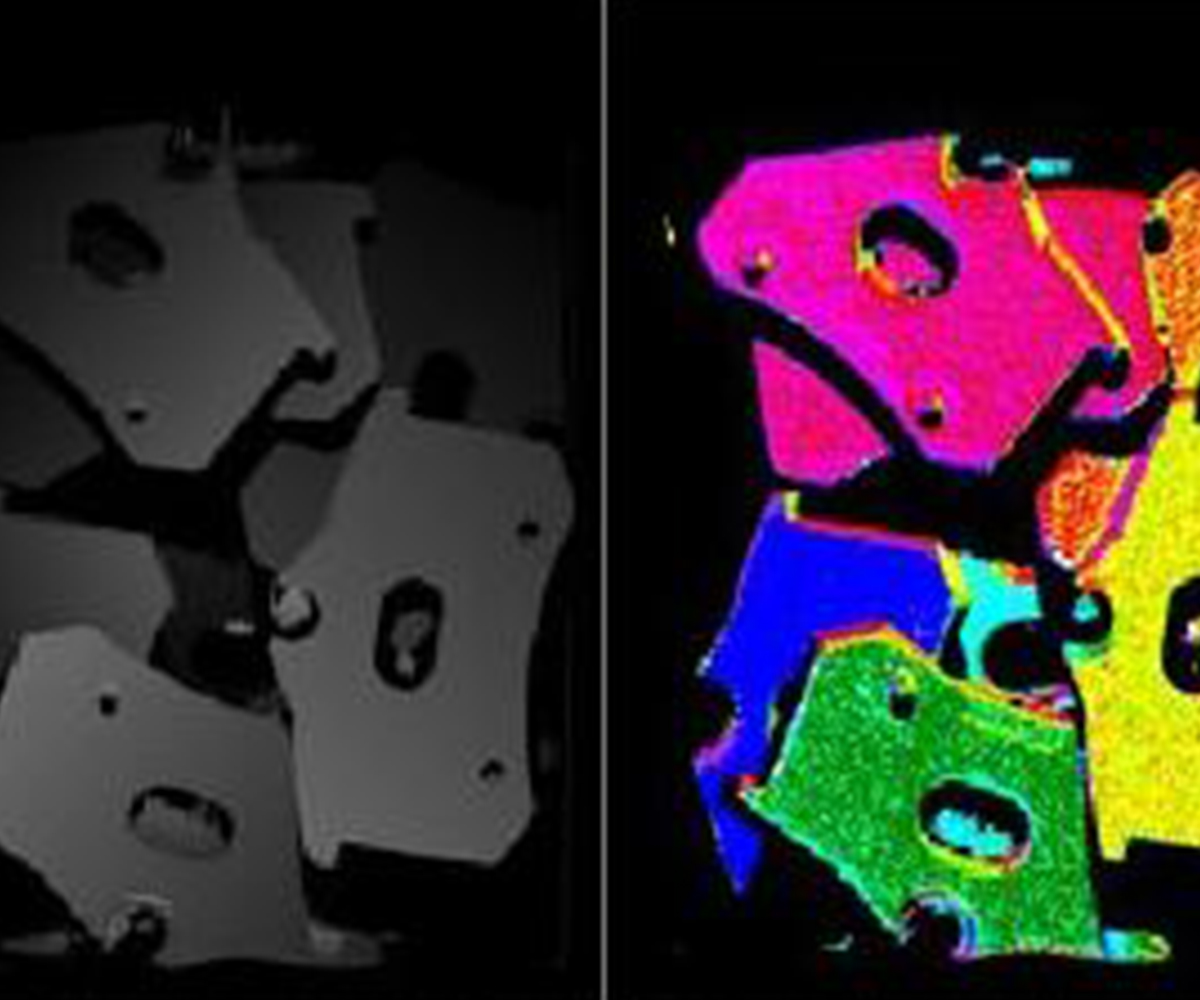
The additional information provided by the third dimension are “simplified” up to calculate the pieces arrangement plane (Figure 5); then it can be applied to all 2D-established techniques such as pattern matching, quality control, dimensional measurements.
The images created by the vision system with laser triangulation are calibrated , ie the pixels are converted to millimeters according to a reference system shared with the Robot. In this way the coordinates exchange is correct and precise. The calibrated images are generated by a proprietary library of three-dimensional image processing where inside are implemented the most recent multidimensional calibration techniques.